AIMC 实验室团队提出了一种面向井下巷道的多源传感器融合自适应里程计算法。该成果已发表于EI工程索引收录期刊《科学技术与工程》,为煤矿井下移动机器人在GNSS拒止、光照不均、粉尘干扰等复杂环境下的高精度定位提供了新的技术方案。
破解井下“定位盲区”:从单一传感器到自适应深度融合
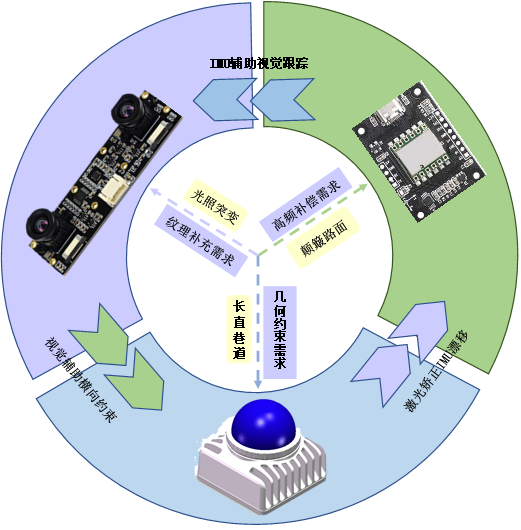
煤矿井下巷道环境恶劣,存在长直结构对称、光线不均匀、粉尘浓度高等突出问题,同时GNSS信号完全拒止,使得移动机器人难以获得可靠的定位信息。单一传感器均存在固有短板:激光里程计在长直巷道中易因“长廊效应”产生横向漂移;视觉里程计对光照变化和粉尘干扰极为敏感;惯性测量单元(IMU)虽能提供高频运动信息,但其误差随时间累积发散,无法独立用于长时定位。如何在多传感器之间实现智能融合与自适应切换,是井下自主导航领域亟待突破的核心难题。
针对这一挑战,研究团队创新性地提出了一种基于激光雷达、双目视觉与IMU紧耦合融合的自适应里程计方法。与现有FAST-LIVO等方法采用固定噪声模型不同,该算法在融合层面引入了在线自适应调节机制,使系统在传感器性能退化时能够主动降低不可靠观测的权重,从而实现“感知—评估—调整”的闭环智能决策。
关键技术突破:多模态一致性退化指标与自适应噪声调控
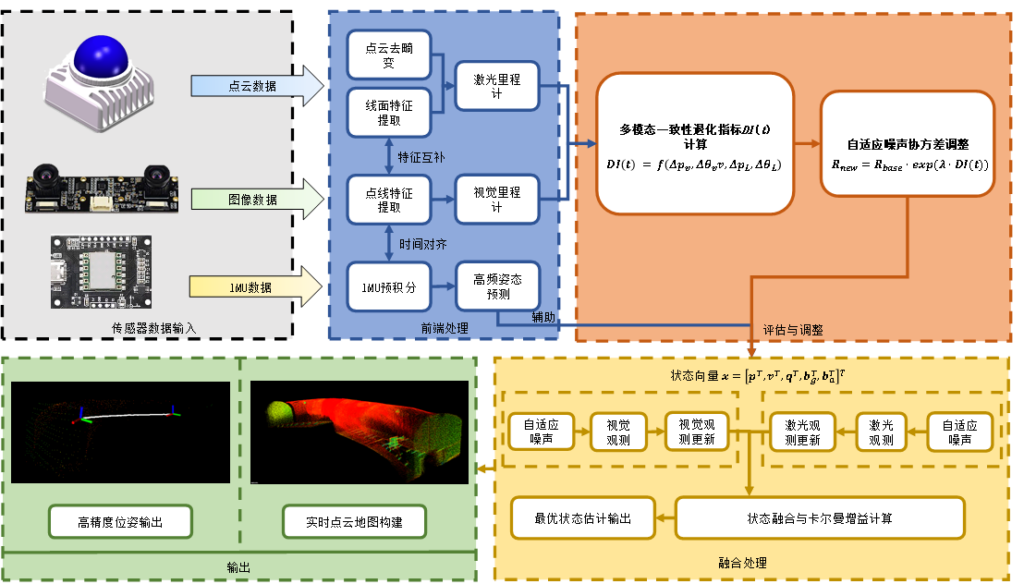
该研究的核心创新在于设计了一种多模态一致性退化指标,通过量化视觉里程计与激光里程计在同一运动时段内输出位姿增量的归一化相对偏差,从多传感器输出一致性的角度对系统可靠性进行实时评估。区别于以往基于单一传感器信号的退化判据,该方法能够有效检测单模态指标交叉退化的情况,克服了传统评估方法的盲区。
基于该退化指标,研究团队进一步设计了指数型自适应噪声协方差调整机制。当检测到传感器间输出不一致时,系统通过连续指数函数平滑增大相应传感器的观测噪声协方差,自动降低退化传感器的权重;当传感器恢复正常后,系统自动恢复对观测信息的充分利用。这一机制保证了协方差矩阵始终正定,避免了滤波器发散,响应平滑无跳变,更有利于井下机器人的实时在线应用。
实验验证:精度与鲁棒性双提升
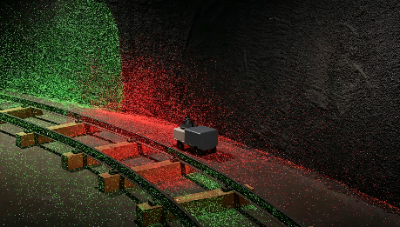
研究团队在安徽理工大学国家重点实验室模拟井下巷道场景中开展了系统验证。实验环境按实际巷道2:1复刻,涵盖长直巷道、光照突变区域、粉尘区域、转弯路口、颠簸陡坡路段等井下典型工况。搭载RK3588s主控、Mid360激光雷达、ICM40609 IMU及双目视觉相机的四轮差速移动机器人平台,以0.15 m/s速度完成了全流程测试。
实验结果表明,本文方法的绝对轨迹误差均方根(ATE_RMSE)为0.2163 m,最大绝对轨迹误差为0.3564 m。与主流算法FAST-LIO2相比,建图精度提升约9.6%;在长廊、光照突变、粉尘等恶劣工况下,系统依然能够获得稳定输出。消融实验进一步证实,自适应调整机制对全局轨迹精度的改善贡献为46.4%,退化指标在线感知贡献53.6%,二者协同取得最优融合精度。
在建图效果方面,本文方法所构建的三维点云地图整体连贯性良好,巷道结构清晰,长廊段两壁面平行笔直,转弯处几何特征连续,不存在明显断层和错位。相比之下,FAST-LIO2构建的地图在后段出现一定的漂移和局部扭曲。
研究价值与展望
该研究验证了所提出的自适应机制在增强井下里程计环境适应性和估计精度方面的显著优势。该方法以局部短期精度的微小代价换取了全局长期稳定性,在井下巷道中全局轨迹和地图质量尤为关键的背景下,具有重要的工程实用价值。
研究成果不仅可为井下移动机器人的自主导航、路径规划和高层决策提供高精度状态估计支撑,也为复杂环境下多传感器融合导航提供了新的技术思路。研究团队表示,后续将对本文方法开展轻量化设计,争取尽早投入工程应用,实现在真实矿山环境中的部署。
该工作得到了国家自然科学基金项目(No.52374154、No.52174141)和安徽理工大学高层次引进人才科研启动基金(No.2022yjrc46)的资助。